Solo build · HW + SW Open source · MITGravely ZT X 52 · 2026
Autonomous Zero-Turn Mower
A ground-up retrofit that turns a commercial gas zero-turn into a self-driving, iPad-controlled
robot. RTK GPS, LiDAR, cameras, and on-device AI — engineered end-to-end across
hardware, firmware, control software, and parametric CAD, and reproducible on any zero-turn by
re-measuring a handful of dimensions.
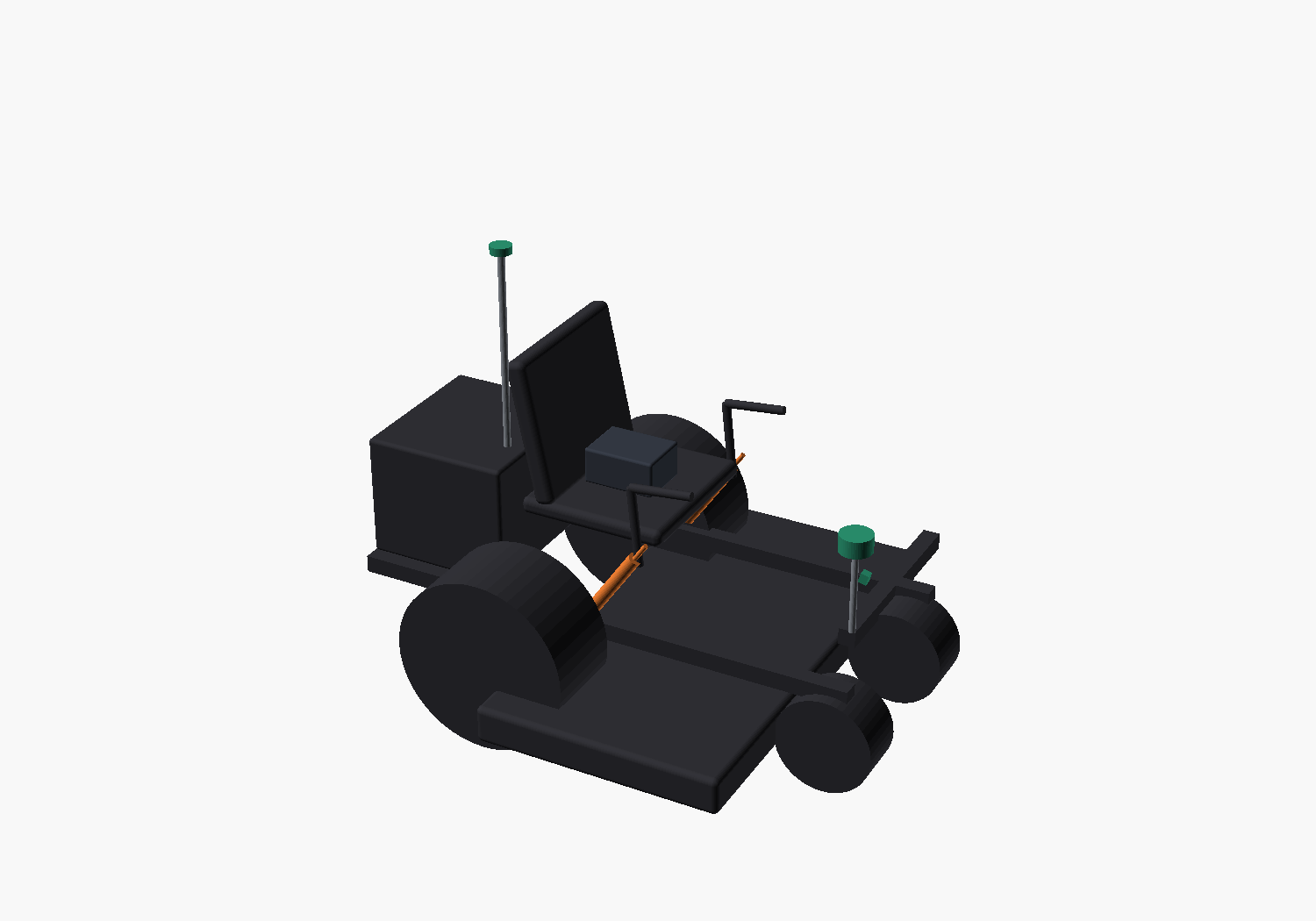
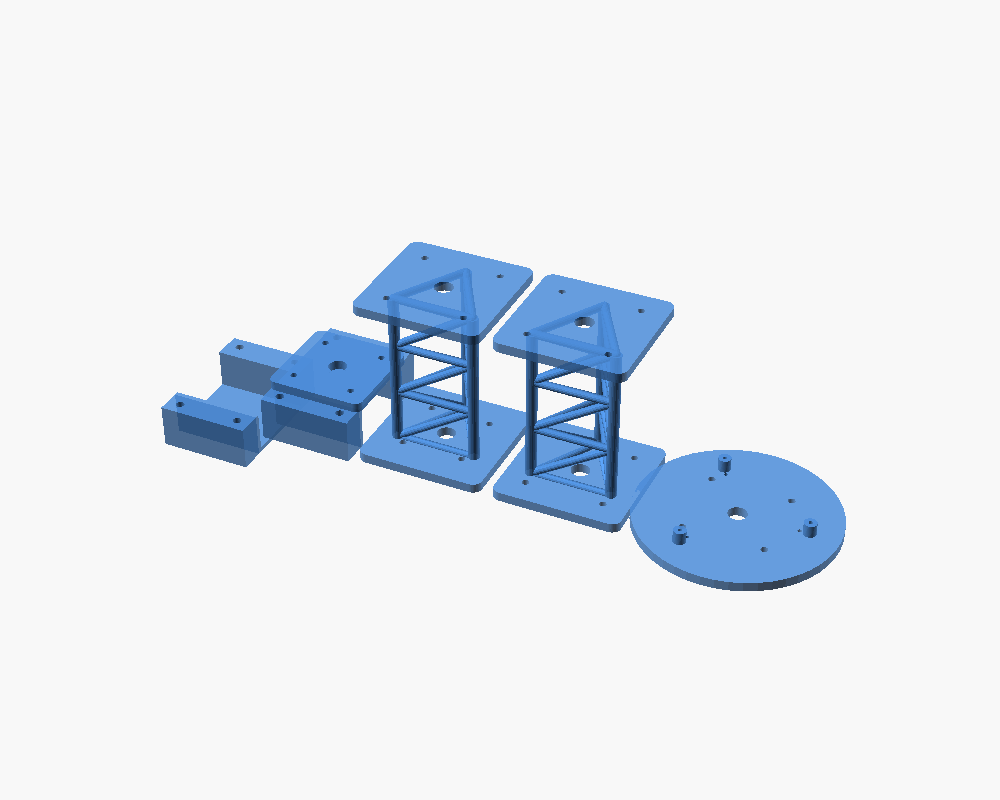
Every component is modeled to the datasheet as one parametric assembly. This is the
real exported geometry — drag to rotate, scroll to zoom. The retrofit hardware bolts onto a confirmed
Gravely ZT X 52 (2021, Kohler).
Not one black box — responsibility is split across compute that's purpose-built for each
job, coordinating over MAVLink. A real-time flight controller drives and navigates; a Linux companion sees;
a microcontroller closes the analog steering loop the autopilot can't.
The Driver
Pixhawk 6C
ArduPilot Rover · skid-steer
Owns drive: throttle-left / throttle-right
RTK waypoint missions + geofence
Hardware / RC / GCS failsafe chain
Fail-to-neutral on any link loss
The Eyes
Raspberry Pi 5 + Hailo-8L
13 TOPS NPU · vision + UI host
Camera AI on the Hailo NPU, on-device
Fuses LiDAR + ultrasonic → stop verdict
Serves one web UI: iPad + on-unit kiosk
Uploads coverage missions to the FC
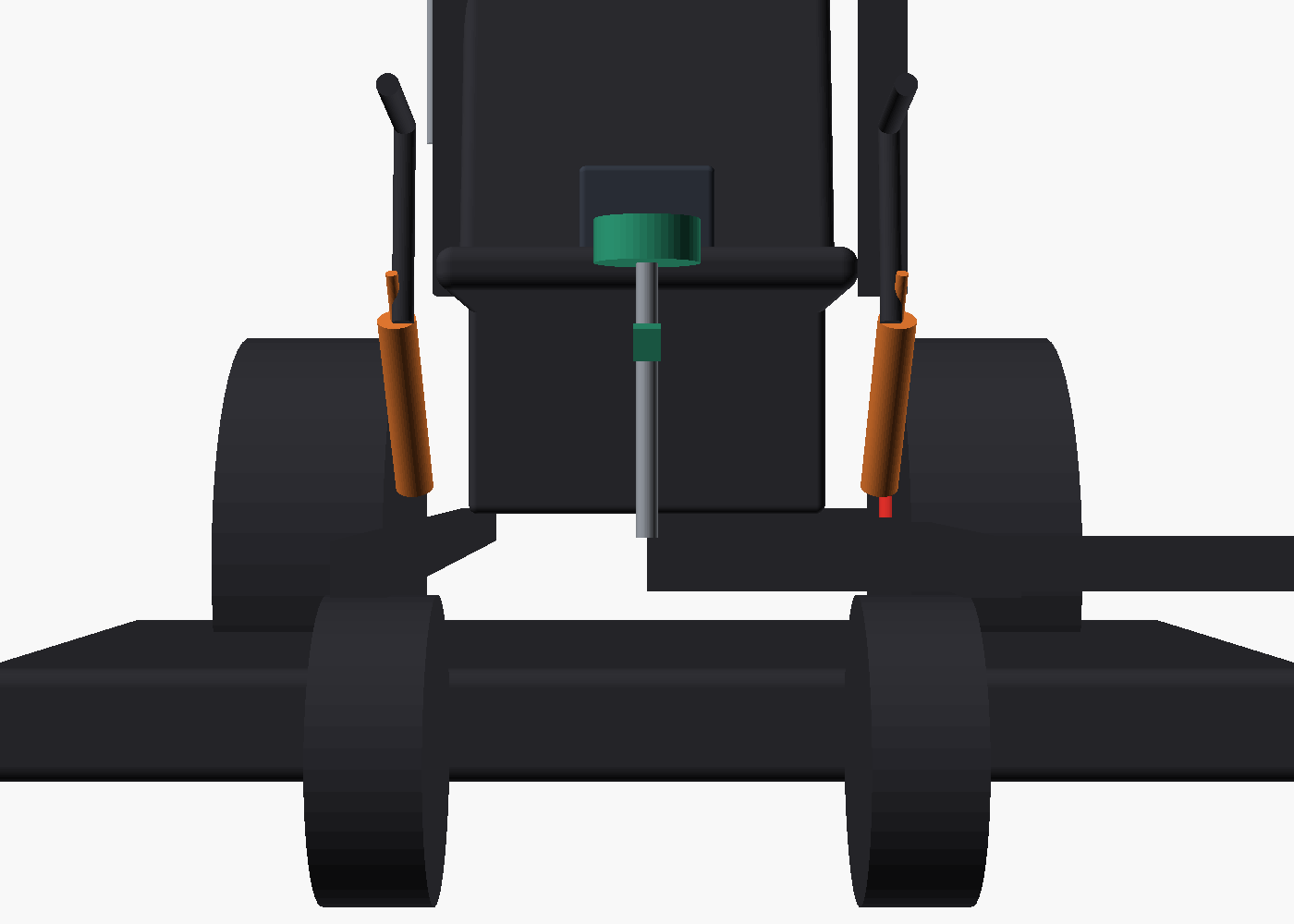
The Hands
ESP32
Lap-bar PID · closed loop
Reads FC PWM setpoint + 2 position pots
PID-drives both lap-bar actuators
Fails actuators to neutral on e-stop
The loop the autopilot can't run directly
PixhawkMAVLinkPi 5
Sense
Dual RTK GPS±2cm
360° LiDAR10Hz
2× camerasAI
Overhead sonar1.6m
feeds
Think
Pixhawk 6Cnav
Pi 5 + Hailovision
ESP32PID
commands
Act
Lap-bar L/Rdrive
PTO relayblades
Throttle servoRPM
The control UI · running live
The interface, not a screenshot
This is the actual planned control UI — one web app that serves both the iPad over WiFi
and the on-unit touchscreen. It's embedded here running on an in-browser telemetry simulator,
so it arms, drives a coverage route, draws the mowed trail, and reacts to live hazards in real time. Tap the
controls — they work.
LIVE — simulated telemetry
Tesla-clean, built for a touchscreen
A single status verb tells you the machine's state at a glance — PARKED → READY → MOWING — backed
by a top-down mockup that turns red when blades engage and throws an obstacle arc when something's ahead.
Teach & repeat and draw-a-zone → auto-coverage — the planner fills the rows and uploads them as a mission.
Live OpenStreetMap with an RTK heading arrow and a green trail of exactly what's been mowed.
Front + rear AI camera feeds with grass-coverage % and live hazard boxes from the on-device model.
TILT, OVERHEAD & obstacle chips flip to warning/critical and cut the mission before the hazard.
On-screen E-STOP commands HOLD · disarm · blade-off — backing up the physical kill chain.
Precision
Centimeters, not "close enough"
The upgrade that matters is dual-antenna moving-baseline heading. One RTK
antenna gives a great position but a noisy heading at a standstill; a second antenna fixes heading
geometrically, so the machine tracks straight rows from the moment it starts.
±2 cm
Position
RTK-fixed ZED-F9P
~0.4°
Heading
moving baseline
few cm
Cross-track
row-to-row
13 TOPS
On-device AI
Hailo-8L
Teach & Repeat
Drive the path once; it repeats the RTK track. Routes persist on the Pi.
Auto-Coverage
Drive the perimeter; a boustrophedon planner fills the rows and uploads AUTO waypoints.
Overhead Clearance
Upward ultrasonic stops the machine below 1.6 m — it won't drive under low limbs.
Incline Safety
IMU pitch/roll watchdog, hard cutoff past 15°. No mowing across steep grades.
Safety
A layered kill chain
A 52" deck can kill. Safety isn't one switch — it's independent layers that each cut drive
and blades, so no single failure leaves the machine moving. Blades stay disconnected until every
layer is proven.
Physical e-stop
Normally-closed, wired in series with drive + PTO — cuts power independent of any code
RC kill switch
Independent radio cutoff for drive relay + blade relay
Software interlock
Evaluates incline (15°), overhead (1.6 m) & obstacle every cycle → cuts drive + PTO
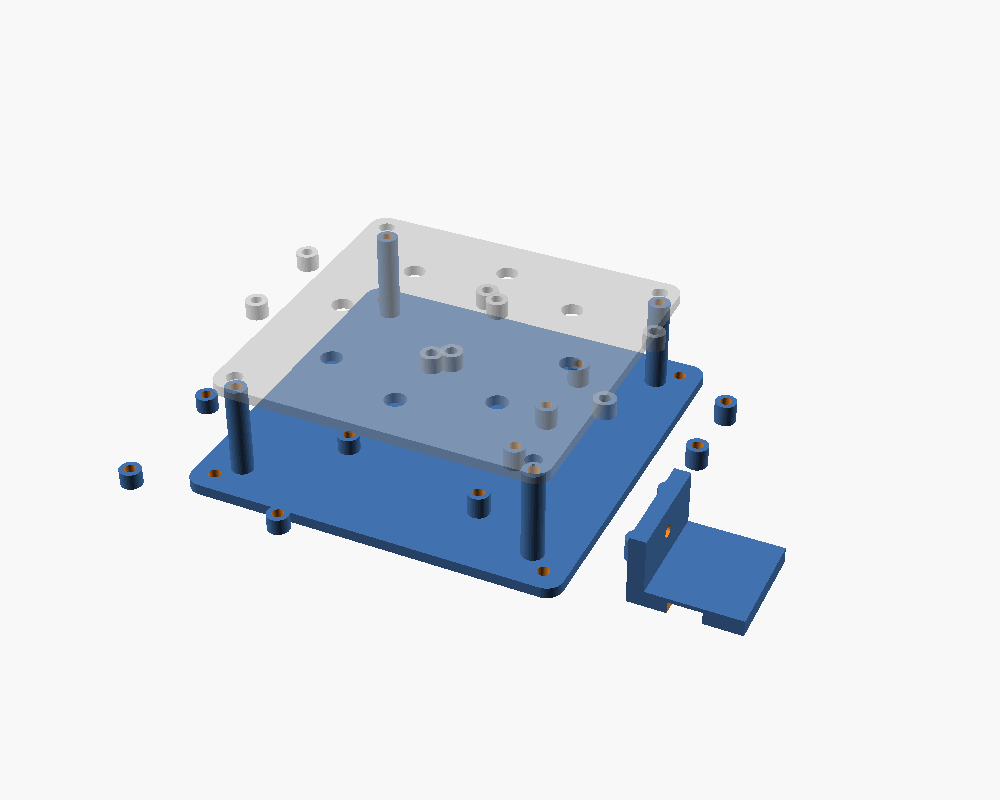
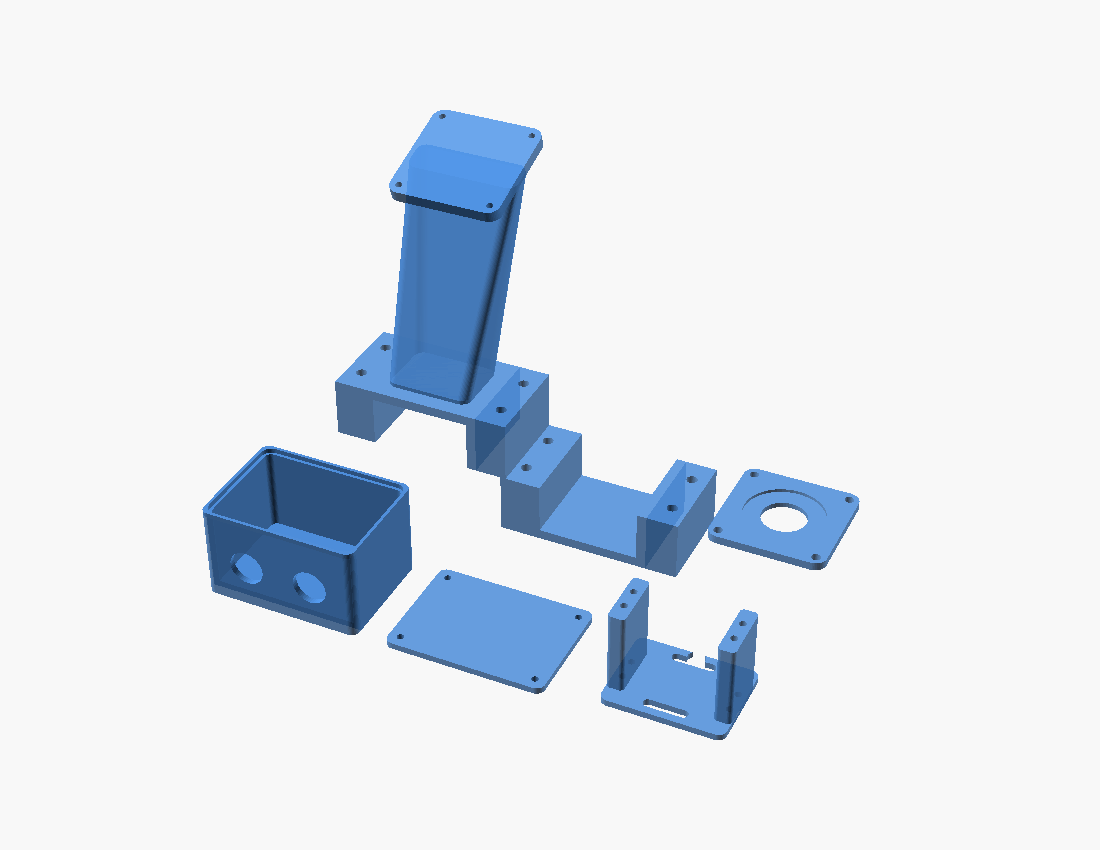
The entire mount system is one OpenSCAD model. Section 1 of params.scad holds the
only per-machine measurements — change those and re-render to fit a different zero-turn. Every printable part
is bed-fit checked and ships with a baked-in adhesion brim.
Real, in-stock parts — verified against live listings, no fabricated SKUs. Full itemized BOM in the repo.
Open source & what's next
Build it yourself — or scale it
The whole project is open source under the MIT License — CAD, firmware, control
software, wiring diagrams, and the build manual. The retrofit generalizes to any zero-turn, which opens a path
toward robot-mowing-as-a-service for commercial grounds and solar-farm vegetation management.
Source repository
Everything: cad/ · software/ · firmware/ · docs/ · cart/. Clone it, edit one params file, and print. MIT · 25/25 tests · 24 print-ready parts.
Design, CAD, firmware, control software, and docs are complete and verified. Not physically built yet — a multi-month, safety-gated build, not a plug-and-play kit.